Week 8
Feb 20, 2018
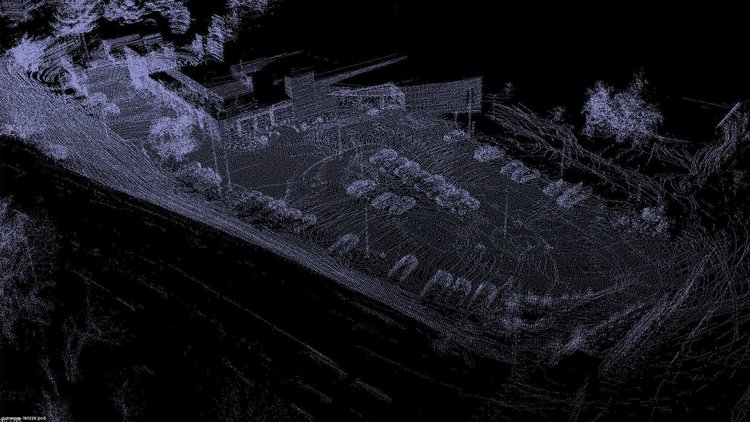
Sensing and Processing
This week, monumental visual progress was made. After connecting the Inertial Measurement Unit to the Velodyne VLP-16, a much awaited high quality map was created and can be seen above. Additionally, the order for the front mount was sent to the JMU machine shop and we are awaiting its completion in order to finish mounting the sensors. In terms of the ZED Stereo Camera, a method to create maps was formulated as a backup in case we run into complications with the Velodyne. We are also further investigating how to set up the ZED for lane line detection. Our power consumption demands have been met and are in.
Front End Team
We finishing connecting the website to the server. Once connection has been finished it will have dynamic buttons for the location select as well as be subscribed to the location of the golf cart. The app is connected to the server. Is subscribed to the location of the golf cart, and has access to all locations on the server. This updates automatically. The logic is in place to display the route to the destination. We just need to get the list in order to create it. The database has been completely set up, and contains 150+ locations on campus that you can go to. Add and deletes parameters are created and finished as well. Following this weeks meeting will be conducting surveys concerning the aesthetic and the functionality of the website and the app. Using the survey information we will make changes as we see fit.
Planning and Navigation
This week we continued updating the API so that we are now able to retrieve any locations on the database, and create new locations on the database, in real time. This was all done using HTTP GET requests. We added multiple new locations with their actual names, addresses, lat and long. We also created the final version of our ROS node network design. This allows us to know exactly what nodes we will need to make, what each node does, and how they will communicate. This diagram is almost fully complete and we have started to write the actual implementation as well as considered path planning libraries and algorithms.
Motor Control
This week we finished the steering design, the Jetson mounting system, the electrical supply system, and the brake pedal mount.

Subscribe to our News letter
News letters have not begun yet, but will as they become necessary. For now updates can be found under blog posts.